Prerequisite
剛体の慣性モーメントは,

と定義される2階のテンソルである.
この定義からすぐにわかるように 

慣性モーメントを要素とする行列 
直交行列とはその転置行列と逆行列が一致するような行列のことである; 
ある直交行列 



すると対角化は次のように式で書ける:
対角化された慣性モーメント 
本節ではギリシア文字の添え字 
回転のエネルギーは,

となる.
行列の積を成分であらわに書けば, 
そこで新たに角速度ベクトル 


となる.
ここで 


とまとめられる.
実は座標系をうまく選ぶことで慣性モーメントを対角形にできる.
直交行列 
新しい座標系の軸を
すると慣性モーメントテンソルの定義において,直交行列の性質 


と変換される.
こうして座標変換 
ふつう剛体の方程式は慣性モーメントテンソルが対角化されている方が解きやすい.
慣性モーメントテンソルは 
よって剛体の重心から見た非慣性座標系として
慣性主軸での基本ベクトルを 

非慣性系に慣性主軸をとったときの剛体の運動方程式について見てみよう.
重心の並進運動に関してはそのままである.
重心回りの回転運動については,

となる.
ここで 
今慣性主軸は非慣性系なので基本ベクトルも時間に依存する.
それゆえ

となる.

第2項の計算を続けると,
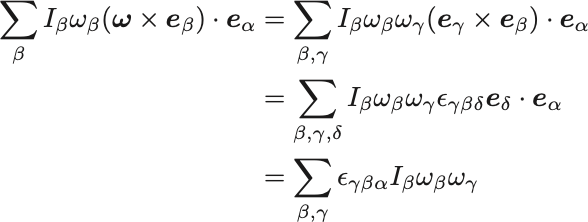
となる.
1行目は 


運動方程式の各成分をあらわに書き下すと,
剛体のEuler方程式
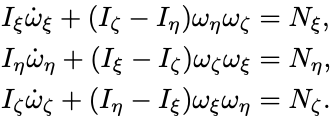
これらは慣性モーメントテンソルが対角化される非慣性座標系から見たときの剛体の回転運動を記述する方程式である.
これを剛体のEuler方程式という.
Euler方程式を解けば
したがって次なる課題は慣性基準系と慣性主軸の基本ベクトルの間の関係式を得ることである.
