Newton方程式では力学的平衡な質点の運動は静止または等速直線運動となる(慣性の法則).
剛体の場合には一般にどのような運動が見られるのだろうか.
剛体の力学的平衡条件は,

である.
それゆえ剛体の重心の運動は静止または等速直線運動することがただちにわかる.
次に重心回りの回転運動について見ていこう.
慣性主軸 
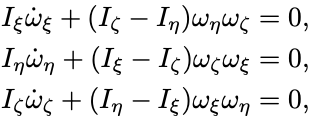
となる.
3つの方程式を一般に解析することは困難なので,慣性モーメントが特別な場合に注目して議論する.
1つ目の例として主慣性モーメントが軸対称, 
このような剛体を対称コマ (symmetric top),あるいはLagrangeコマとよぶ.
このときEuler方程式の 



残りの方程式は,

となる.ここで,
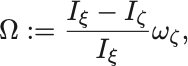
とおいた.
1つ目の方程式の両辺をもう一度時間微分して,2つ目の方程式を代入して 

を得ることができる.
この方程式は角振動数 

一般解は 
この一般解を1つ目の方程式に代入することで 
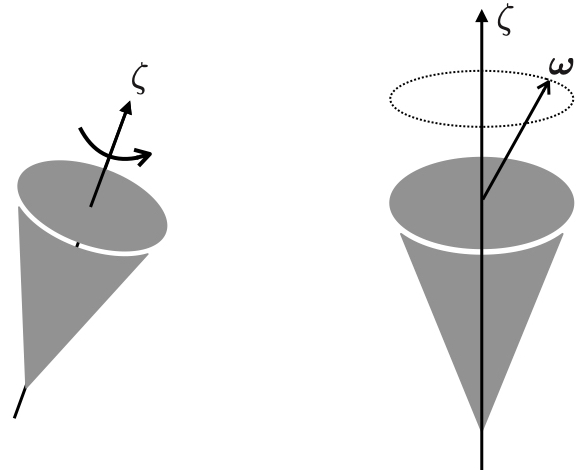
以上から対称コマの角速度ベクトルは 
このような角速度ベクトルのふるまいは歳差運動 (precession) とよばれる.
角運動量ベクトルは 
ただし一般に 

 軸まわりには不安定となる.
軸まわりには不安定となる.2つ目の例として1つの慣性主軸周りにだけ回転する場合を考えよう.
このとき他の軸まわりの回転については小さい影響だけ考慮する.
主慣性モーメントの大小関係を 
Euler方程式を3つの軸それぞれで回転する場合について議論する.
まず 

すると1つ目の方程式から 
残りの方程式は,

となり, 



問題は 
同様の近似で 
残りの方程式は,

となる.
方程式の符号に注目するとこれは単振動を表さないことに気づく.
あえて 

となる.
右辺の第2項に注目すると,因子 
これは最初の摂動の仮定に反する.
したがって,はじめ
このような運動は不安定であるという.
以上をまとめると剛体の3つの慣性主軸まわりの回転のうち慣性モーメントが最大,最小の場合は安定であり,中間の場合は不安定となる.
この事実をテニスラケットの定理という
註)俗にはDzhanibekov効果としても知られる.


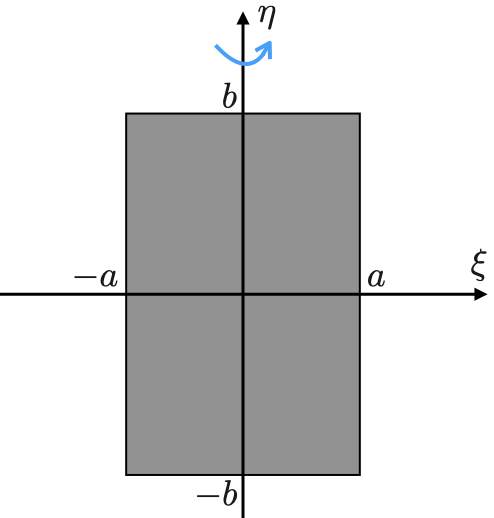
このとき慣性モーメントは 
長方形はそれが含まれる面内での回転で安定であり,短い方の辺を回転軸にしたときも安定である.
ところが長い方の辺を回転軸にした場合は不安定な回転となる.
